Navigating Any Road Condition For Autonomous Driving
We’ve all been there—driving on a dark, foggy night when suddenly visibility drops to near zero or racing to beat an approaching snowstorm, only to get enveloped in a blinding whiteout. Hazardous weather can make even the most routine drive a stressful experience for humans. However, these conditions can become debilitating for autonomous vehicles relying solely on cameras, lidar, and traditional radar.
It’s important to note that this blog focuses specifically on the critical role of localization in autonomous vehicle navigation. While it is understood that the failure of perception systems can compromise other driving functions, our discussion here addresses scenarios where perception systems are operational and effectively performing tasks such as detecting pedestrians, landmark scarcity, and line-of-sight blockage from other vehicles.
However, localization remains challenging in environments like heavily crowded urban canopies with weak GPS signals or snow-covered roads. When visibility is obscured, current sensor suites have the same failure points, presenting a critical safety gap that must be addressed before widespread AV deployment. The Bureau of Transportation conducted a 2019 research experiment with the following results:
Dry vs. Rain:
- Heavy or sustained rainfall presented challenges for all AVs.
- All AVs performed well at lane-keeping on straight, dry roads and in light rainfalls, but performance declined for all AVs when rainfall was heavy or sustained.
Ice and Modest Snow:
- None of the AVs could perform lane-keeping with any amount of ice coverage over the cameras.
- None of the AVs could perform object ranging or following support with any ice covering the radar sensor.
- Even modest amounts of slushy coverage on parts of a heated radar sensor impacted adaptive cruise control functions.
An insurance company or government is unlikely to greenlight AVs operating in such hazardous conditions and putting lives at risk. As RAND highlighted in their 2020 policy analysis, “Adverse weather conditions will affect the safety and mobility of autonomous vehicles…Safe operations in adverse conditions will be required for broad deployment.”
So, how can the autonomous driving industry solve this existential challenge? The answer lies underground – literally.

Ground Penetrating Radar
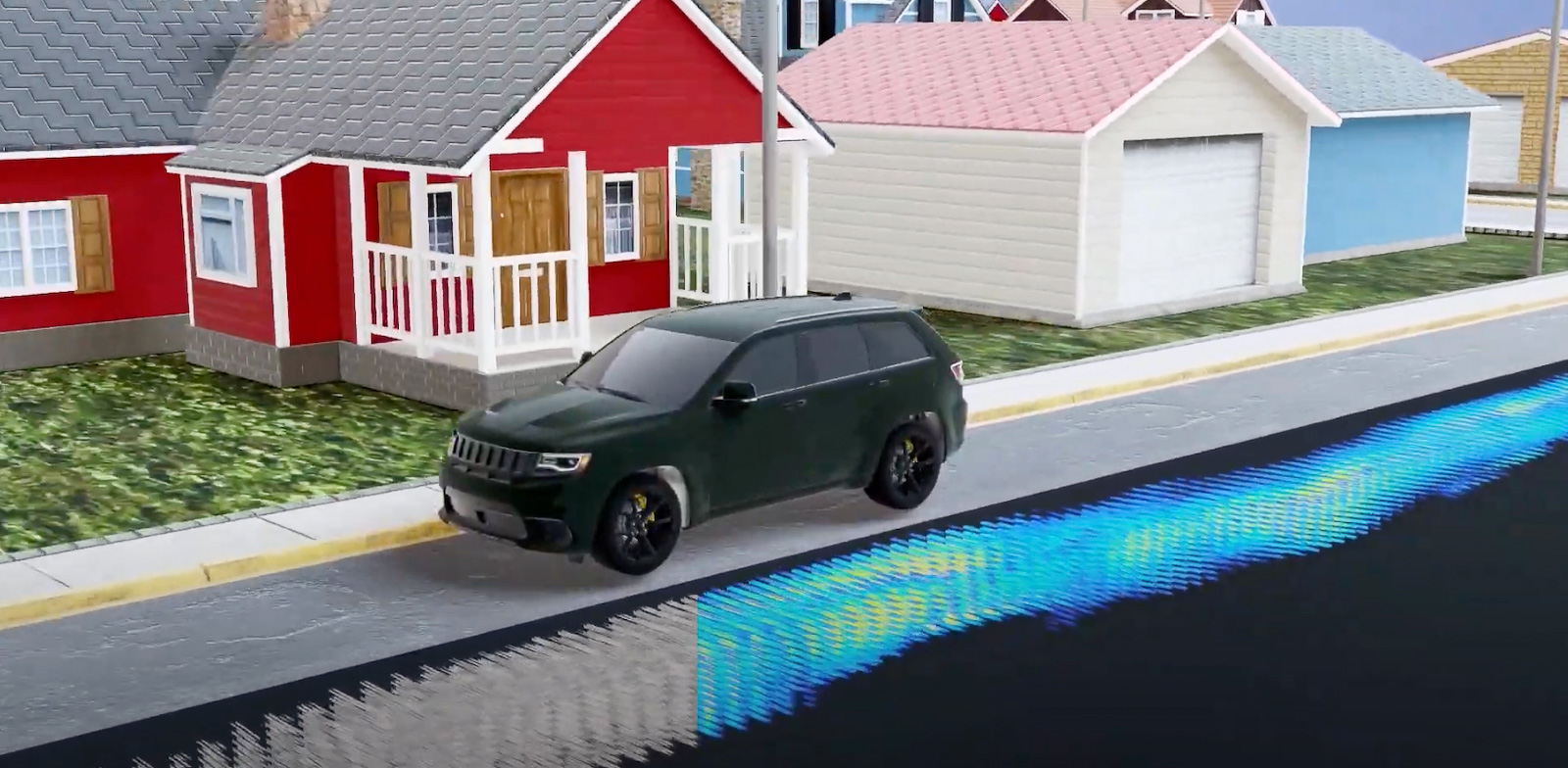
Ground penetrating radar (GPR) represents a breakthrough sensor modality that enables accurate, reliable localization and mapping in all weather conditions, including heavy rain, snow, fog, and dust storms. GPR sees through the atmospheric obscurants handicapping traditional sensors by localizing autonomous vehicles and machinery based on subterranean data.
The sensor penetrates several meters into the subsurface structures and soil composition below the road’s surface. By correlating this underground mapping data in real-time, GPR provides robust, precise localization within centimeter-level accuracy envelopes.
This unique capability delivers a step-function improvement in adverse weather performance compared to existing above-ground sensor modalities. GPR’s reliability in extreme conditions unlocks autonomous operation in geographies and use cases that were previously off-limits.
The Science Behind GPR’s All-Weather Prowess
So what enables GPR to pierce through blinding conditions and deliver pinpoint positioning where other technologies fail? There are three key factors:
Low-Frequency Penetration
GPR typically operates around 300 MHz, a low-frequency band ideal for penetrating air, water, snow, ice, soil, and other obscuring media. A recent study in the Journal of Applied Remote Sensing demonstrated GPR’s remarkable 20+ meter penetration depth through dry/wet snow and pure ice – orders of magnitude greater than 77 GHz automotive radar which is limited to just 1-3 cm.
Subsurface Mapping
Rather than contending with the dynamic surface environment, GPR maps the static subsurface world below, deriving detailed 3D signatures from variations in soil density, moisture content, material boundaries, embedded infrastructure like rebar or pipes, and other subterranean features. This mapping data exhibits rich, stable localization features that persist even as surface conditions drastically change.
Statistical Independence
Because GPR operates in a separate domain from optical and RF sensors, its underlying data exhibits low covariance and is statistically independent of traditional sensing modalities. This diversification effect enables highly robust and reliable multi-sensor fusion for AV perception and localization.
A Breakthrough for Autonomous Mobility
One of the principal barriers keeping autonomous vehicles from going fully driverless has been the inability to operate safely in adverse weather. GPR is a transformative technology that removes this roadblock for the first time.
Leading companies are already integrating GPR into their next-generation sensor suites, recognizing its unique value for delivering all-weather autonomous capabilities. Leaders like BTG Positioning are integrating GPR to enable autonomous operations in harsh environments like seaports.
While challenges remain in multi-sensor fusion, path planning, and intelligent vehicle control, GPR is paving the way for AVs to overcome one of their most formidable technical obstacles. We’re entering a new era in which autonomous mobility systems will have the localization accuracy and environmental awareness to navigate any road, anytime, anywhere safely—rain or shine.
At GPR, we’re leading the way in localization technology for automated driving by creating long-lasting, high-definition maps of road and off-road subsurfaces. Our maps are protected by the ground and remain accurate in even the most challenging environmental conditions. Contact us to learn more about GPR for localization.