The Four Fundamental Questions AVs Must Answer
Already revolutionizing how we perceive transportation, behind the safe execution of autonomous driving lies a complex web of queries that autonomous systems must answer. Here, we try to simplify and condense them and delve into each of these questions to explain how they are integral to the development of autonomous driving.
1. Where am I?
Autonomous platforms must be able to pinpoint their exact location at any given moment with extreme precision. Localization in the context of autonomous driving goes far beyond knowing the geographic coordinates for generic navigation that any GPS system on the market can provide. It means an accurate understanding of the autonomous platform’s position relative to the road infrastructure, other vehicles, and various obstacles down to a few centimeters.
Additionally, localization precision is not a static attribute but a dynamic requirement. As the vehicle drives its route, it must continuously reassess and update its position in real time. This (along with all the other questions) demands a fusion of sensor data, machine learning algorithms, and robust mapping systems to ensure that the AV remains on course. This precision is vital, especially in complex urban environments where slight deviations can have significant consequences.
Whether navigating complex urban landscapes or intricate highways, knowing “Where am I?” allows AVs to plan beyond the current visible model of the world around it provided by the perception sensors and make split-second decisions, adapting to the ever-changing conditions of the road.
2. What’s around me?
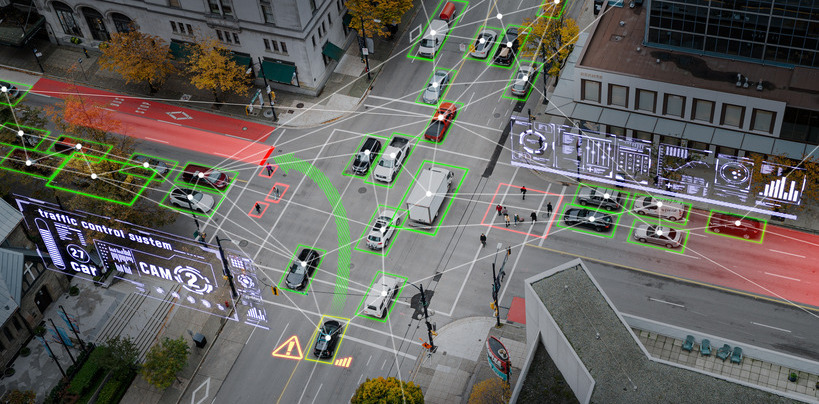
Beyond precise positioning, an autonomous vehicle’s ability to discern and interpret its environment is key to negotiating traffic safely and comfortably. Employing several technologies, including cameras, radars, and laser scanners, all working in tandem to create a 360-degree view around the vehicle, the autonomous platform builds an environmental model of its surroundings.
The perception sensors must be able to classify between static and dynamic objects and understand how each will affect their routes. AVs must navigate around static objects to follow their designated paths. Knowing the locations of fixed elements helps in calculating safe routes and avoiding collisions. Meanwhile, recognizing and responding to dynamic objects allows safe integration into the overall traffic system. Autonomous platforms must dynamically adjust their paths to avoid collisions and ensure the safety of passengers, pedestrians, and other road users.
Each technology has its strengths and weaknesses. Cameras provide rich visual information but can struggle in poor visibility; radar is effective in detecting the velocity of objects but lacks the resolution to identify semantic details; LIDAR offers depth information but can be affected by weather conditions and sensor occlusion. The fusion of data from these sensors creates a comprehensive and redundant system, ensuring reliable perception even in challenging scenarios.
3. Where do I want to go?
The destination is not just a point on the map; it’s a culmination of calculated decisions guided by data and system computations (unlike how humans consciously and subconsciously navigate).
AVs rely on sophisticated algorithms that ingest data from perception and localization sensors to make traffic negotiation decisions, such as lane changes, merging into traffic, and when to slow down, speed up, or stop. Algorithms, finely tuned to balance efficiency and safety, leverage mapping data to determine the optimal route. This involves understanding traffic laws and road signs and calculating speculation of the intentions of other road users.
The decision-making process must be robust, able to handle the unpredictability of the road, and adaptive to different driving cultures and environments. It’s not just about following rules; it is about navigating the nuanced and often unspoken social contracts of driving.
4. How do I get there?
Once the destination is set, the autonomous vehicle must chart a safe course to reach it. Answering the question of “how do I get there” is called path planning.
Path planning for autonomous platforms is not predetermined but a continuous process of optimizing the safest and most efficient path based on other road users, available space, and the road’s ever-changing conditions. Traffic patterns, road closures, and unexpected obstacles demand a high level of adaptability.
Advanced decision-making algorithms process a multitude of data points, optimizing the route to ensure the fastest and safest journey possible.
How GPR Ground Positioning Radar is helping AVs answer these questions
The journey towards fully autonomous driving is complex and multifaceted, with each of the four questions presenting its own set of challenges. Localization ensures precision and is vital for accurate path planning; sensing provides the necessary data to interact safely with the environment; driving policy decides the appropriate actions based on this data; and path planning charts the course to the destination. The integration of these elements is critical to the development of AVs that are not only technologically advanced but also safe, reliable, and efficient.
Sensor fusion is a critical concept in autonomous navigation. Industry leaders agree that no one sensor modality can execute safe autonomous navigation, and to ensure redundancy and functional safety, the autonomous stack must integrate multitude of different sensors.
Traditional sensors like cameras, lidar, and radar rely on direct line of sight. Sensor occlusion, weather, sunlight glare, landmark changes and other factors can disrupt visibility or the sensor’s ability to identify landmarks. These sensors share the same failure points, so there isn’t sufficient backup or reliable, continuous data to ensure functional safety.
That’s where GPR’s Ground Positioning Radar comes in. Using GPR, autonomous platforms add to their data arsenal a long-lasting high-definition map of the road’s subsurface. Protected by the ground, this map remains accurate even in tough weather conditions like rain or snow.
AVs can reliably know precisely where they are uninterrupted, no matter the conditions, adapt to changing circumstances, perform minimum-risk maneuvers, and optimize their path to ensure the fastest and safest journey.
To learn more about GPR technology, contact us.